
Produktoj


YST-125Handle Motor Assisted Manipulator
Mallonga Priskribo:
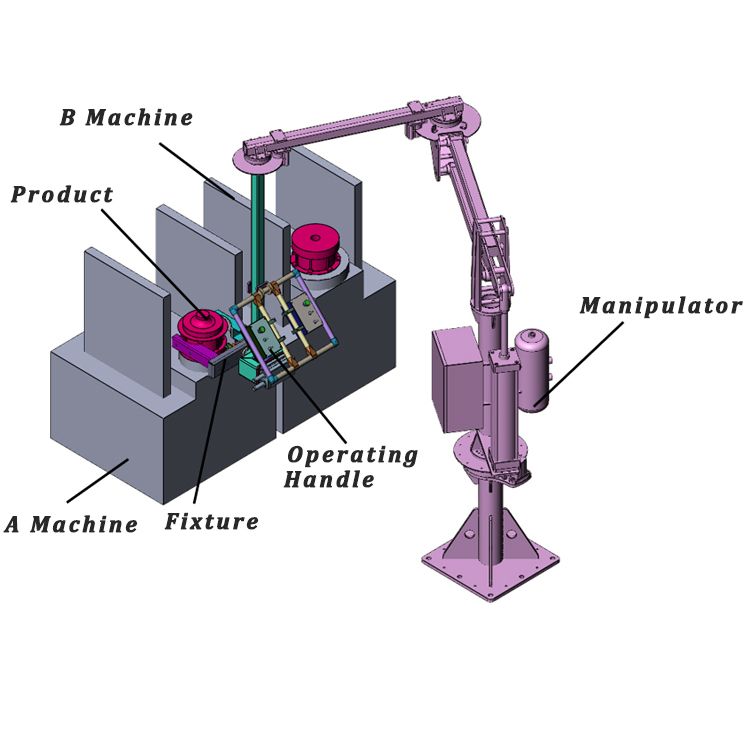
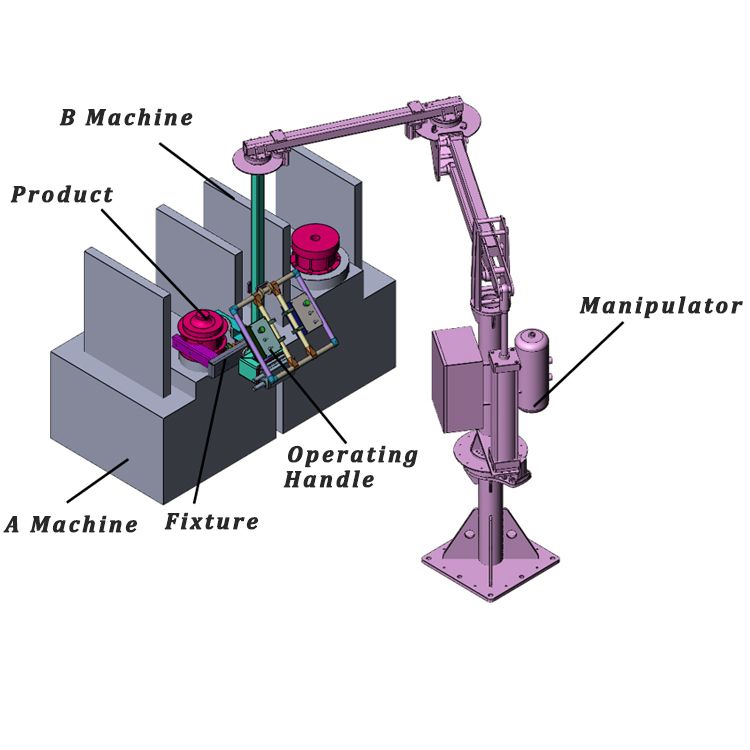
La potenc-helpata manipulatoro, ankaŭ konata kiel la ekvilibra gruo, estas nova potenc-helpa aparato por materiala manipulado kaj labor-ŝpara operacio dum instalado.

Ĝi genie aplikas la principon de fortoekvilibro, tiel ke la funkciigisto povas puŝi kaj tiri la pezon laŭe, kaj tiam ĝi povas moviĝi kaj poziciiĝi en spaco en ekvilibro. Sen lerta trotada operacio, la funkciigisto povas puŝi kaj tiri la pezan objekton mane, kaj la peza objekto povas esti metita en ajna pozicio en la spaco ĝuste.

Por porteblo de la helpita manipulatoro, simpla solvo estas munti la surterigitan foston de la helpita manipulatoro al granda ŝtala plato por funkcii kiel kontraŭpezilo al la manipulatoro kaj la totala ŝarĝo. Tiam, ensakigante la forkon sur la ŝtala telero, la unuo povas esti facile movita al ajna loko per ĉaro lifto. Ni nomas ĝin movebla povo-helpata manipulatoro.
La povo-helpata manipulatoro, la fiksaĵo povas esti personecigita laŭ la bezonoj, kaj ĝi taŭgas por pritraktado kaj ŝarĝo kaj malŝarĝo de diversaj laborpecoj. La produkta pezo estas 50KG, la laborradiuso de la manipulatoro estas 2.5 metroj, kaj la leva alteco estas 1.3 metroj.

pri ni

Ni estas profesia personigita aŭtomatiga ekipaĵo fabrikisto. Niaj produktoj inkluzivas senpaletigilon, elektan kaj lokan pakmaŝinon, paletizilon, robotan integrigan aplikaĵon, ŝarĝadon kaj malŝarĝan manipulantojn, karton-formadon, karton-sigeladon, paletdissendilon, pakmaŝinon kaj aliajn aŭtomatigajn solvojn por malantaŭa pakaĵlinio.
Nia fabrika areo estas ĉirkaŭ 3,500 kvadrataj metroj. La kerna teknika teamo havas averaĝe 5-10 jarojn da sperto en mekanika aŭtomatigo, inkluzive de 2 mekanikaj dezajnaj inĝenieroj. 1 programinĝeniero, 8 asembleaj laboristoj, 4 post-venda sencimiga persono, kaj aliaj 10 laboristoj
Nia principo estas "kliento unue, kvalito unue, reputacio unue", ni ĉiam helpas niajn klientojn "pliigi produktadkapaciton, redukti kostojn kaj plibonigi kvaliton", ni strebas por iĝi ĉefa provizanto en la maŝina aŭtomatiga industrio.
Kablo-potenca robotmanipulanto
| Modelo | YST-125 | |
| mekanika strukturo | Helpita Manipulanto | |
| maniero de ekzekuto | Duonaŭtomatigo | |
| Paletiganta Pezo (sen fiksaĵo) | 20 kg | |
| Movada akso | 3 Akso | |
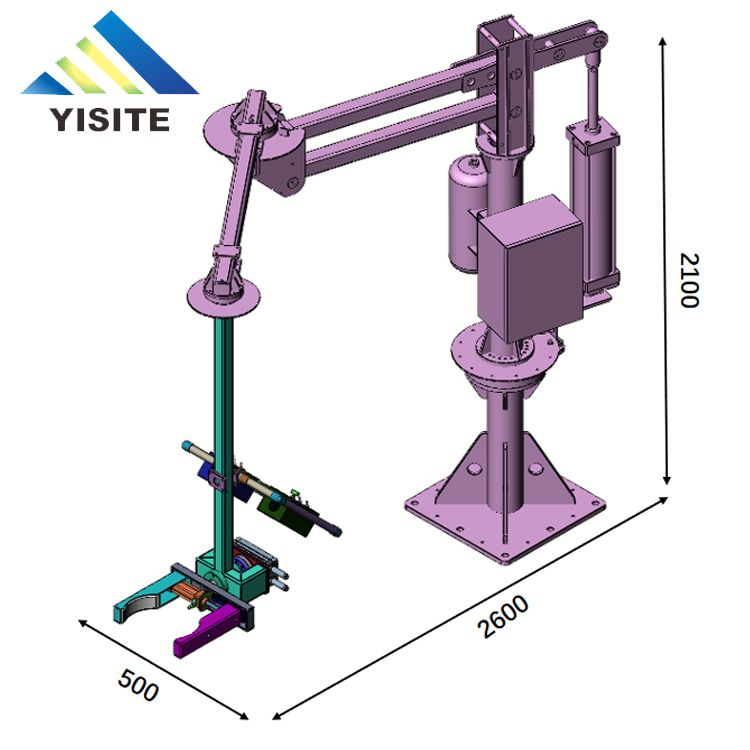
| Aktuliga Gamo | Z-akso (Supren malsupren) | 1400mm |
| akso 1 (Spin) | 0-300° | |
| akso 2 (Spin) | 0-300° | |
| akso 3 (Spin) | 0-300° | |
| Maksimuma spinradiuso | 2000 mm | |
| La korpa pezo (sen fiksaĵo) | 200 kg | |
Produktaj Detaloj
1. La movebla povo-helpata manipulatoro havas plenan gamon suspendan funkcion, kaj la operacio estas facila kaj senpaga;
2. La potenca manipulanto estas fabrikita laŭ la principoj de ergonomio, kaj la operacio estas komforta kaj oportuna;
3. La strukturo-dezajno de la movebla povo-helpata manipulatoro estas modula, kaj la aera cirkvito-kontrolo estas integrita;
4. La movebla povo-helpata manipulatoro helpas redukti laborkostojn je 50%, redukti laborintensecon je 85% kaj pliigi produktan efikecon je 50%;
5. La movebla povo-helpata manipulatoro estas personecigita laŭ la produkta ŝarĝo kaj operacio-streko, kun diversaj formoj por renkonti malsamajn bezonojn.









