
Produktoj
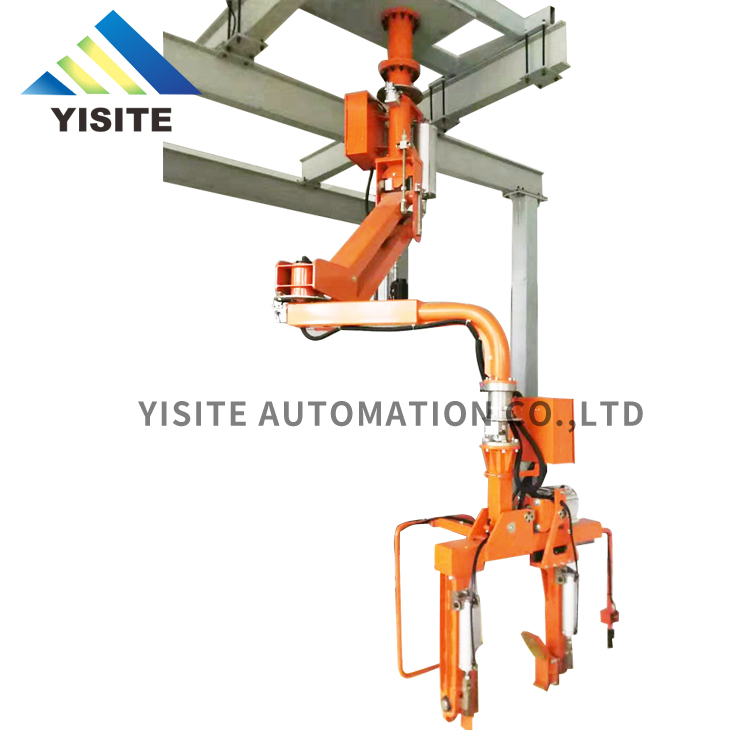


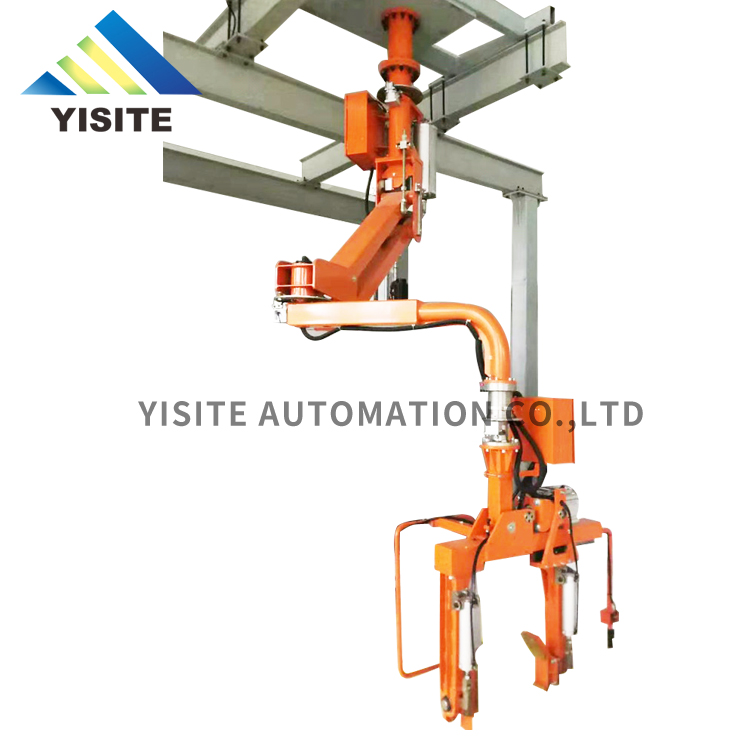
pendado Jib Cranes Manipulator
Mallonga Priskribo:
La penda akcelilo manipulator konsistas el la instalaĵo bazo, gastiganto kaj ŝtala brako bastono, fiksaĵo.La ĉefa brako povas esti turnita 360 gradoj, la dua brako bastono povas esti turnita 270 gradoj por atingi la laboran gamon de kovrado, kaj la rotacio povas aldoni la bremsa mekanismo.Ĝi taŭgas por altfrekvenca uzado, poziciigado, muntado de komponantoj kaj aliaj okazoj.



pri ni

Ni estas profesia personigita aŭtomatiga ekipaĵo fabrikisto. Niaj produktoj inkluzivas senpaletigilon, elektan kaj lokan pakmaŝinon, paletizilon, robotan integrigan aplikaĵon, ŝarĝadon kaj malŝarĝan manipulantojn, karton-formadon, karton-sigeladon, paletdissendilon, pakmaŝinon kaj aliajn aŭtomatigajn solvojn por malantaŭa pakaĵlinio.
Nia fabrika areo estas ĉirkaŭ 3,500 kvadrataj metroj. La kerna teknika teamo havas averaĝe 5-10 jarojn da sperto en mekanika aŭtomatigo, inkluzive de 2 mekanikaj dezajnaj inĝenieroj. 1 programinĝeniero, 8 asembleaj laboristoj, 4 post-venda sencimiga persono, kaj aliaj 10 laboristoj
Nia principo estas "kliento unue, kvalito unue, reputacio unue", ni ĉiam helpas niajn klientojn "pliigi produktadkapaciton, redukti kostojn kaj plibonigi kvaliton", ni strebas por iĝi ĉefa provizanto en la maŝina aŭtomatiga industrio.
Produktaj karakterizaĵoj
Detektante la suĉan tason aŭ la finon de la manipulatoro kaj ekvilibrigante la gasan premon en la cilindro, ĝi povas aŭtomate identigi la ŝarĝon sur la mekanika brako, kaj aŭtomate ĝustigi la aerpremon en la cilindro per la pneŭmatika logika kontrola cirkvito, por atingi la celo de aŭtomata ekvilibro.Kiam ĝi funkcias, pezaj objektoj estas kiel esti suspenditaj en la aero, kio povas eviti la kolizion de produkta aldokiĝo.Ene de la laborintervalo de la mekanika brako, la funkciigisto povas facile movi ĝin reen, maldekstren kaj malsupren al iu ajn. pozicio, kaj la persono mem povas facile funkcii.Samtempe, la pneŭmatika cirkvito ankaŭ havas ĉenprotektajn funkciojn kiel malhelpi hazardan perdon de objekto kaj protekto de premo.

La laborprincipo kaj reĝimo de la suspenda potenca manipulatoro:
Detektante la suĉan tason aŭ la finon de la manipulatoro kaj ekvilibrigante la gasan premon en la cilindro, ĝi povas aŭtomate identigi la ŝarĝon sur la mekanika brako, kaj aŭtomate ĝustigi la aerpremon en la cilindro per la pneŭmatika logika kontrola cirkvito, por atingi la celo de aŭtomata ekvilibro.Kiam laboras, pezaj objektoj estas kiel esti suspenditaj en la aero, kio povas eviti la kolizion de produkta aldokiĝo.Ene de la laborintervalo de la mekanika brako, la funkciigisto povas facile movi ĝin reen, maldekstren kaj malsupren al ajna pozicio. , kaj la persono mem povas facile funkcii.Samtempe, la pneŭmatika cirkvito ankaŭ havas ĉenprotektajn funkciojn kiel malhelpi hazardan perdon de objekto kaj protekto de premo.
Trajtoj
Maksimuma utila ŝarĝo. 900 Kg
Maksimuma Ago-radiuso: 4500 mm
Vertikala Vojaĝo: 0,5 m/min
Kontrolsistemo: 2200 mm
Kontrolsistemo: aero plene pneŭmatika
Provizo: kunpremita aero (40 µm), ne enhavas grason
Labora premo: 0,7 ÷ 0,8 Mpa
Labora temperaturo: +0° ĝis +45° C
Bruo:aerkonsumo: 100 Nl ÷ 400 N per ciklo
Rotacio: Kolumna arbo kaj fiksaĵo-ŝakto 360° daŭra rotacio, meza ŝafto 300° daŭra rotacio







