
Produktoj
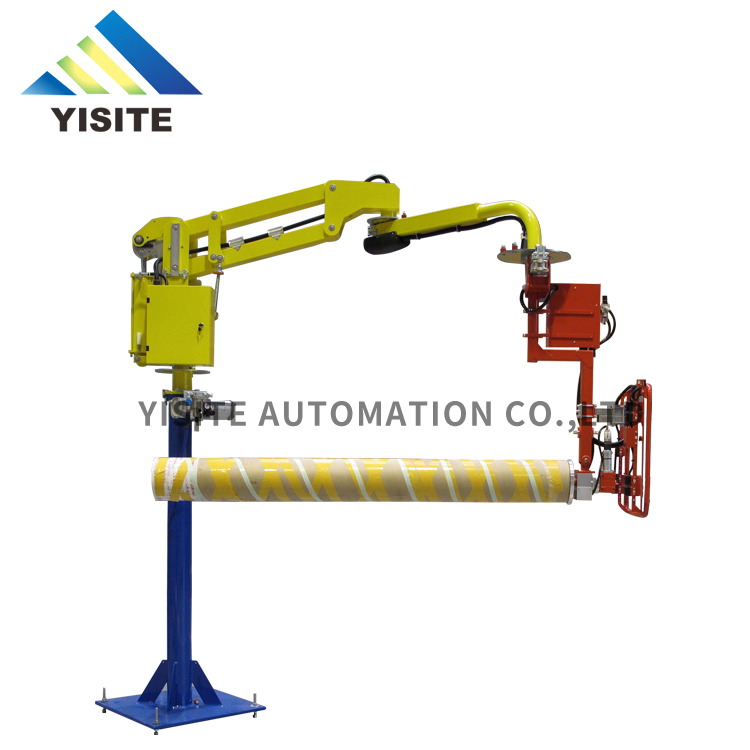
rulo materialoj pritraktanta manipulatoro
Mallonga Priskribo:
Pneŭmatika manipulatoro, ankaŭ konata kiel manipulatoro, ekvilibra gruo, ekvilibra akcelilo, mana ŝarĝa transiga maŝino (la supra deklaro ne estas profesia sed estas populara en Ĉinio), estas romano, uzata por materiala manipulado kaj instalado kaj laborŝpara operacio de potencaj ekipaĵoj.
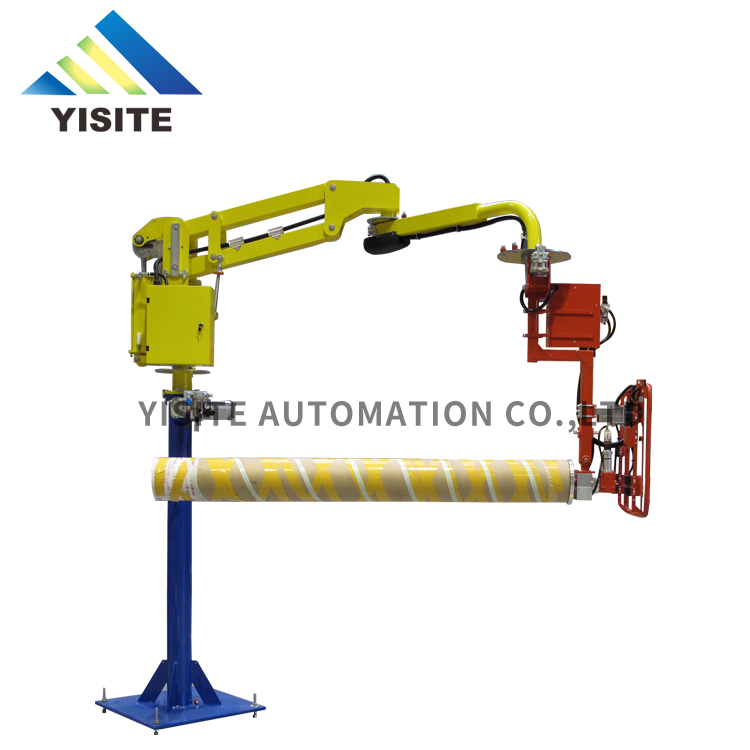
rulo materialoj pritraktanta manipulator aplikas la ekvilibro principo de forto, tiel ke la operatoro povas puŝi kaj tiri la pezan objekton laŭe, kiu povas ekvilibrigi la moviĝanta poziciigado en spaco.La peza objekto formas flosanta staton kiam levado aŭ malkreskanta, kaj ne-operacio forto estas garantiita de la gasvojo (la pretiga procezo kaj dezajna kosto kontrolo, la operacia forto estas malpli ol 3kg kiel la juĝa normo) la operacia forto estas tuŝita de la laborpeco de la laborpeco.Sen lerta operacio, la operatoro povas premu kaj tiri la pezan objekton mane kaj metu la pezon ĝuste en ajna pozicio en la spaco.

pri ni

Ni estas profesia personigita aŭtomatiga ekipaĵo fabrikisto. Niaj produktoj inkluzivas senpaletigilon, elektan kaj lokan pakmaŝinon, paletizilon, robotan integrigan aplikaĵon, ŝarĝadon kaj malŝarĝan manipulantojn, karton-formadon, karton-sigeladon, paletdissendilon, pakmaŝinon kaj aliajn aŭtomatigajn solvojn por malantaŭa pakaĵlinio.
Nia fabrika areo estas ĉirkaŭ 3,500 kvadrataj metroj. La kerna teknika teamo havas averaĝe 5-10 jarojn da sperto en mekanika aŭtomatigo, inkluzive de 2 mekanikaj dezajnaj inĝenieroj. 1 programinĝeniero, 8 asembleaj laboristoj, 4 post-venda sencimiga persono, kaj aliaj 10 laboristoj
Nia principo estas "kliento unue, kvalito unue, reputacio unue", ni ĉiam helpas niajn klientojn "pliigi produktadkapaciton, redukti kostojn kaj plibonigi kvaliton", ni strebas por iĝi ĉefa provizanto en la maŝina aŭtomatiga industrio.
Produktaj trajtoj
- 1. Kiam la tordmomanto estas generita, la laborpartoj renversiĝis aŭ kliniĝis, kaj la planta alteco estas limigita.
2. La tuta procezo estas "flosanta", kio multe reduktas la elektran konsumon de pritraktantaj laborpartoj de laboristoj.
3. Ekipita per bremsa aparato por efike ŝlosi la rotacian junton por malhelpi drivon.
4. Gas-rompa protekto kaj alarmo, memŝlosado por malhelpi falon kiam aero premo falas.
5. Protekto kaj kontrola aparato de partoj por eviti hazardan efikon kaj amasiĝon de polvo, kaj certigi la stabilan funkciadon de precizaj elementoj.







